Grasping and Manipulation Deformable Objects
Description
Grasping and manipulating non-rigid and porous objects is an important challenge for manufacturing, which many scientists are currently engaged in. Now there are many problems in handling non-rigid (textile) materials from a stack or oriented in space. The goal of this project is to development of gripping devices, their control systems and manipulation methods for non-rigid objects. Such grippers and new methods of manipulation would allow to automate manufacturing where non-rigid objects are used. In addition, important aspects are the use of household robotic systems with the ability to grasping and manipulate a flexible object, which is practically not used now due to its complexity.
Funding
This project was supported in part by the U.S. Department of State (DOS), Bureau of Educational and Cultural Affairs (ECA), Exchange Visitor Program #G-1-00005 with the cooperation of the Institute of International Education (IIE) under Fulbright Grant PS00322778.
Colaboration
- Department of Systems Innovation, Osaka University (Japan).
- National Institute of Advanced Industrial Science and Technology (AIST, Japan).
- Department of Robotics Engineering, Worcester Polytechnic Institute (USA).
- Texas Robotics, The University of Texas at Austin (USA).
- Department of Industrial Automation and Mechatronics, Technical University of Kosice (Slovak Republic).
- Department of Automation Technological Processes and Manufacturing, Ternopil Ivan Puluj National Technical University (Ukraine).
Materials
Grasping and Manipulation Materials
| № | Materials | Coefficient | Weight | Thickness | Microscopy (x20 and x150) |
|---|---|---|---|---|---|
| of friction | [g/cm*cm] | [mm] | |||
| with GD | |||||
| 0 | Linen | 0.32 | 0.0181 | 0.23 | 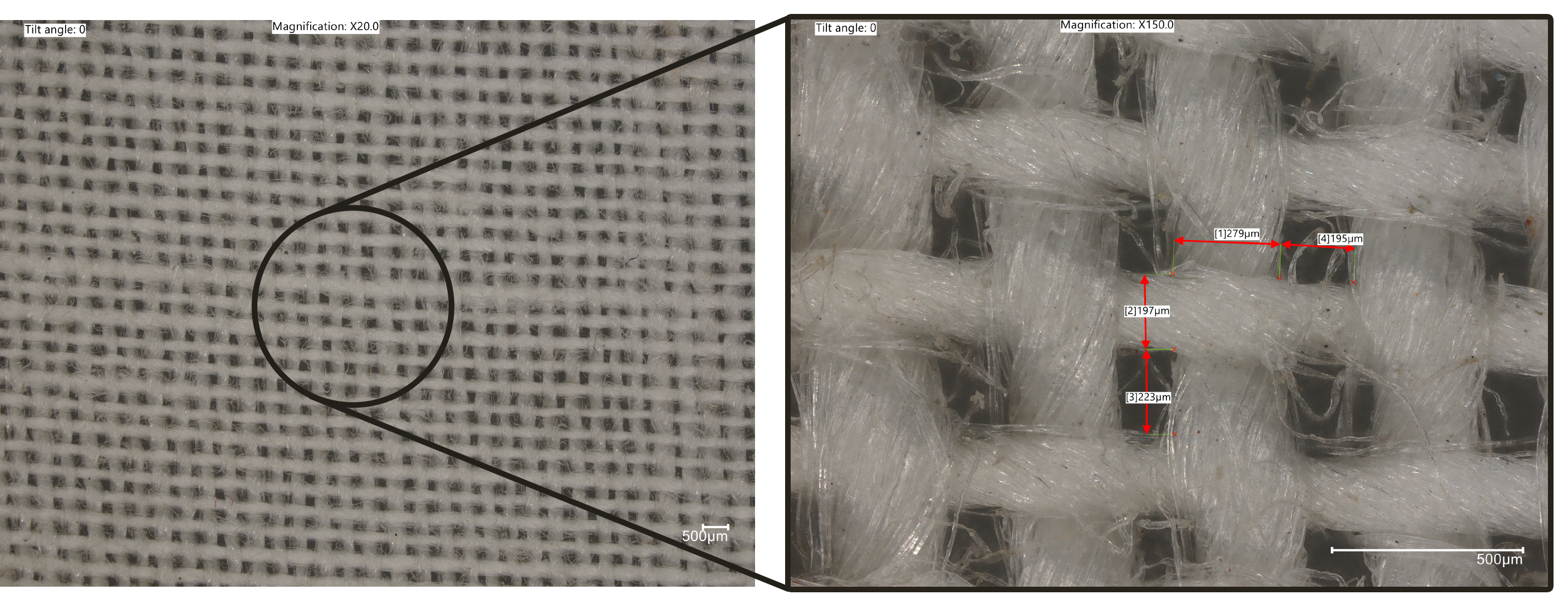 |
| 1 | Film | 0.19 | 0.0047 | 0.05 | |
| 2 | Woven | 0.40 | 0.0175 | 0.27 | 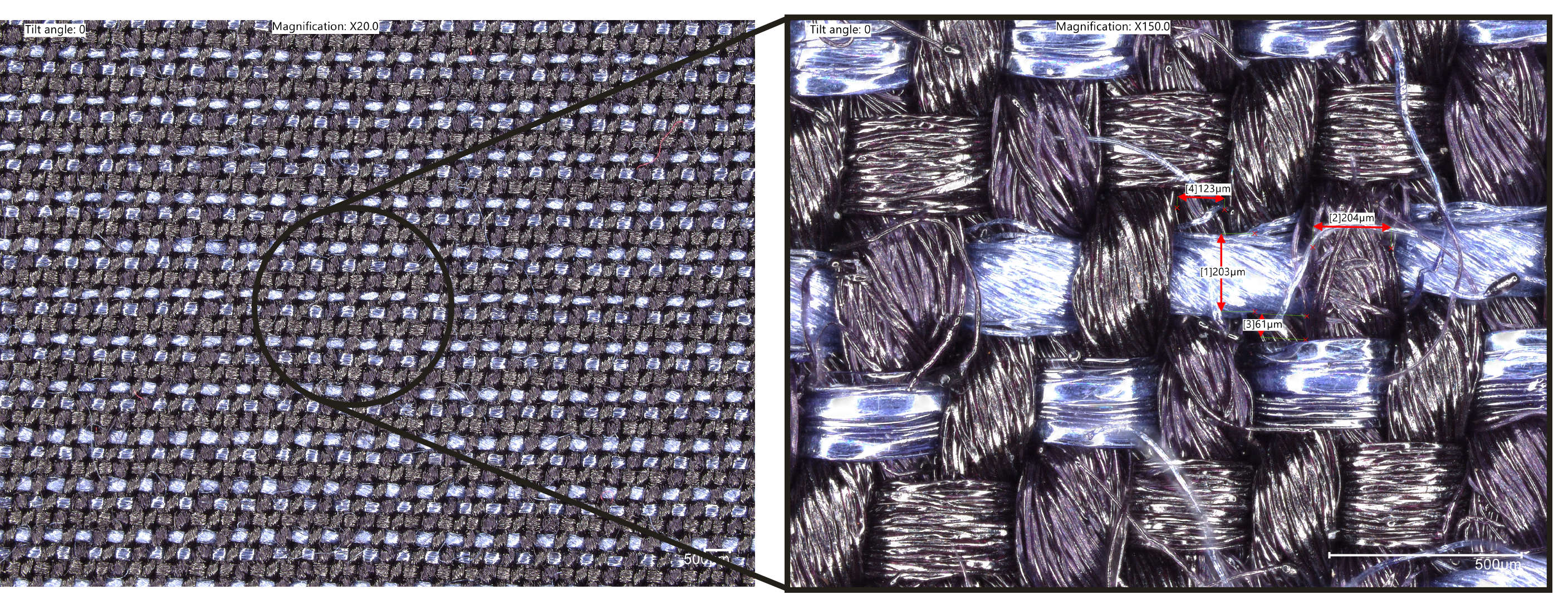 |
| 3 | Flannel | 0.37 | 0.0102 | 0.13 | 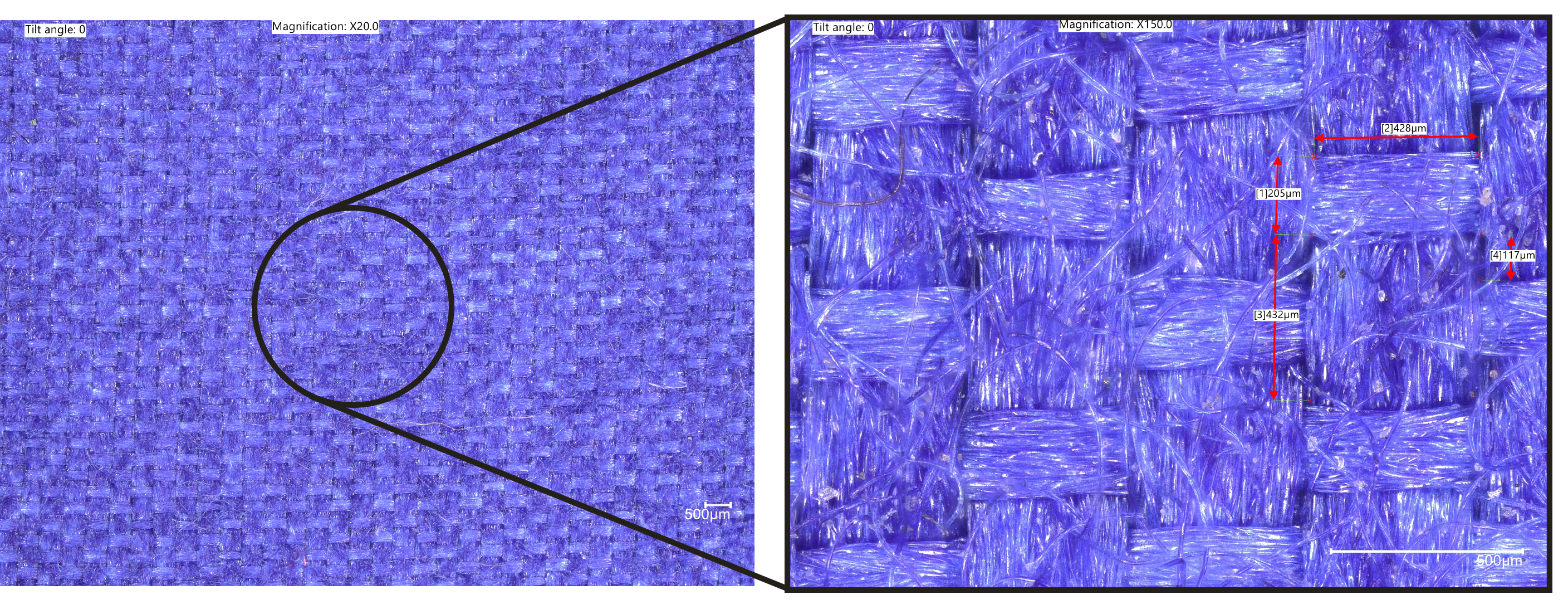 |
| 4 | Polyester | 0.29 | 0.0072 | 0.12 | 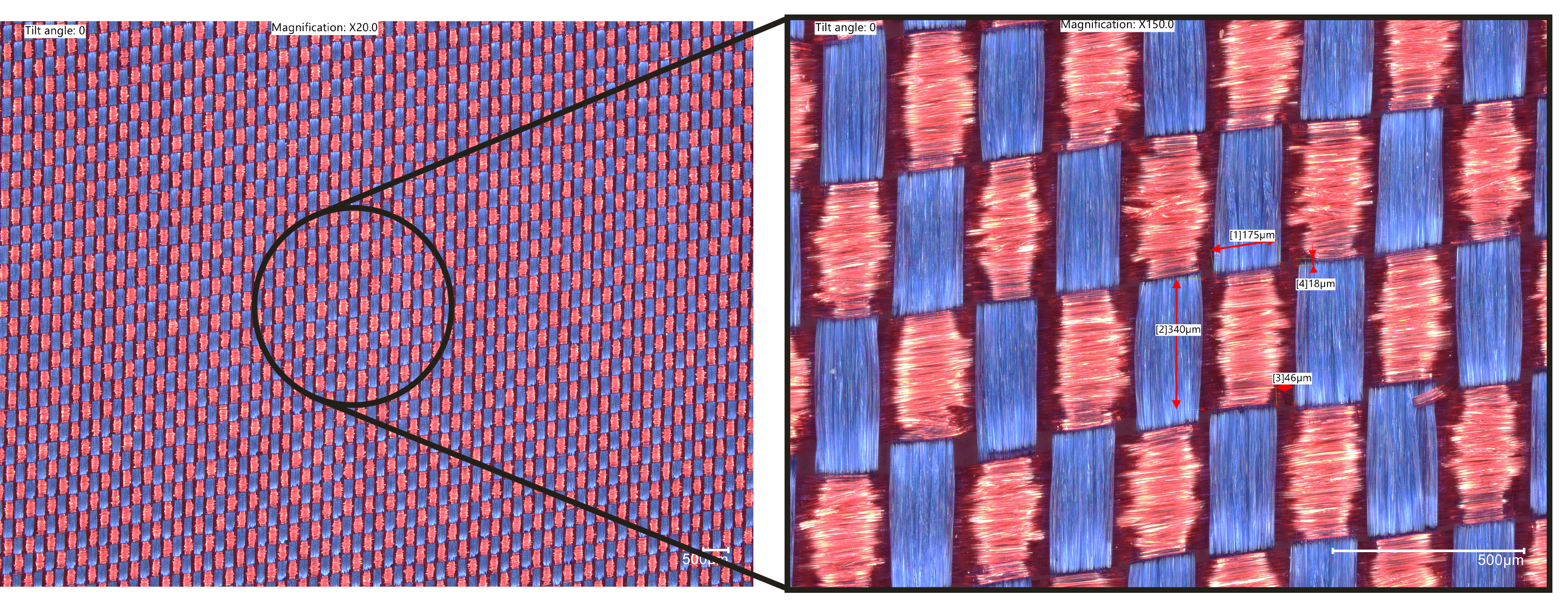 |
| 5 | Stretch | 0.33 | 0.0124 | 0.26 | 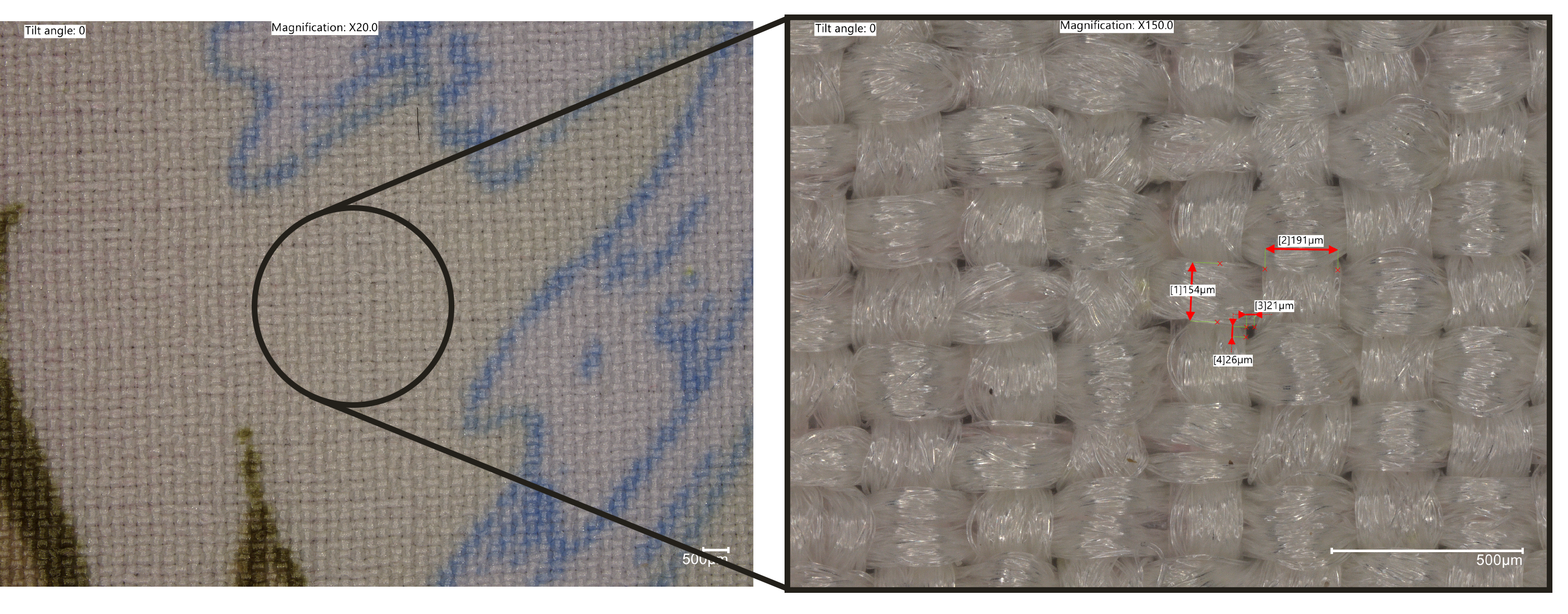 |
| 6 | Polyester | 0.34 | 0.0154 | 0.22 | 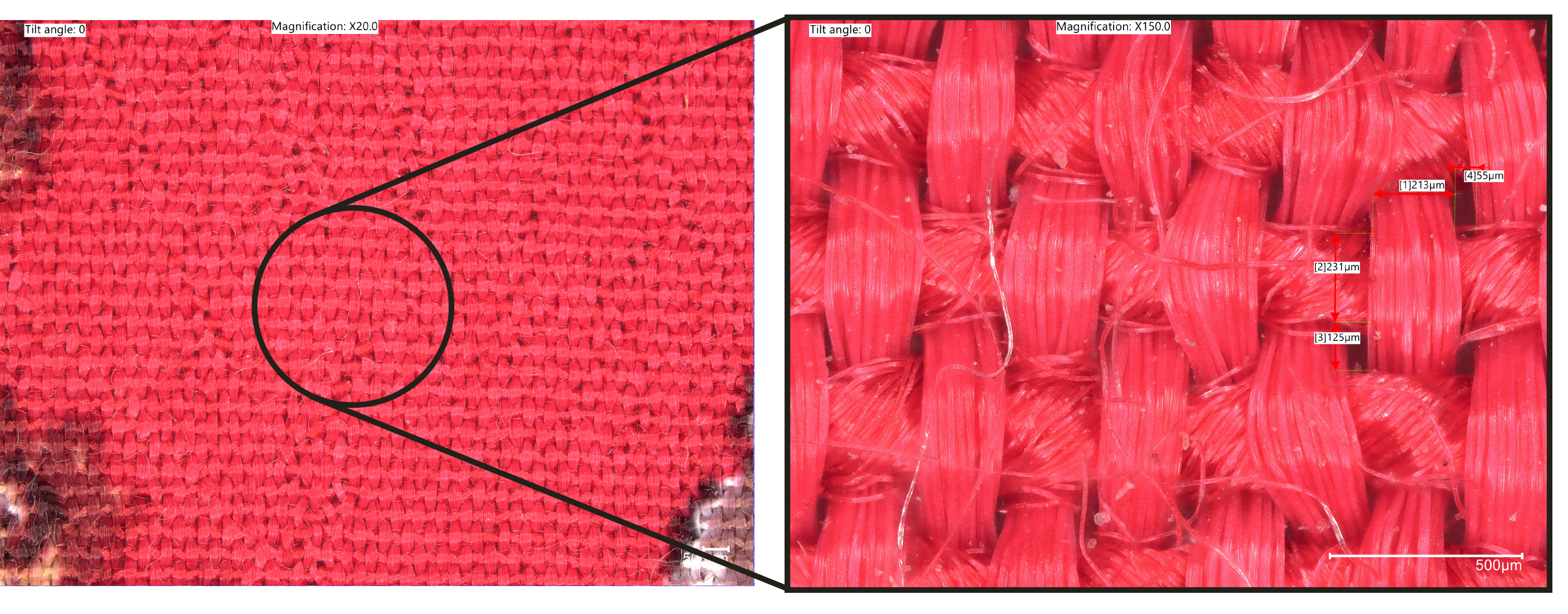 |
| 7 | Satin | 0.39 | 0.0165 | 0.41 | 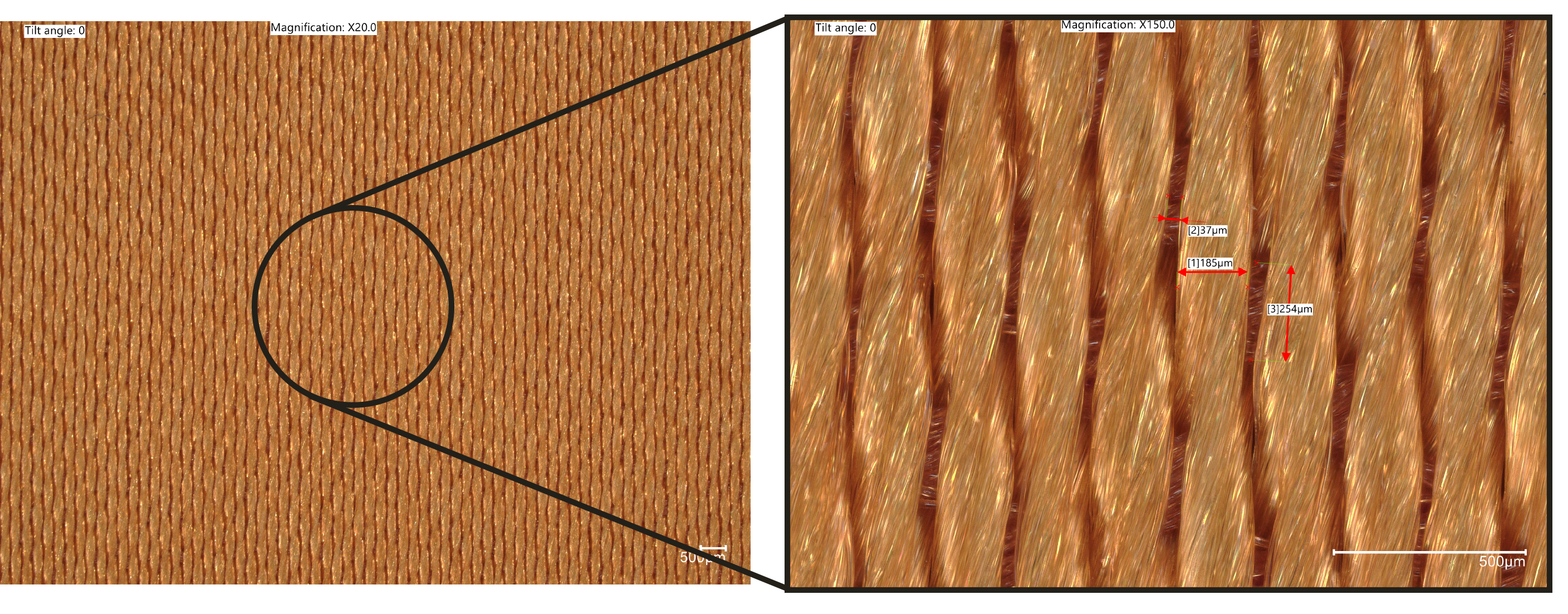 |
| 8 | Satin (100% Polyester) | 0.21 | 0.008 | 0.15 | 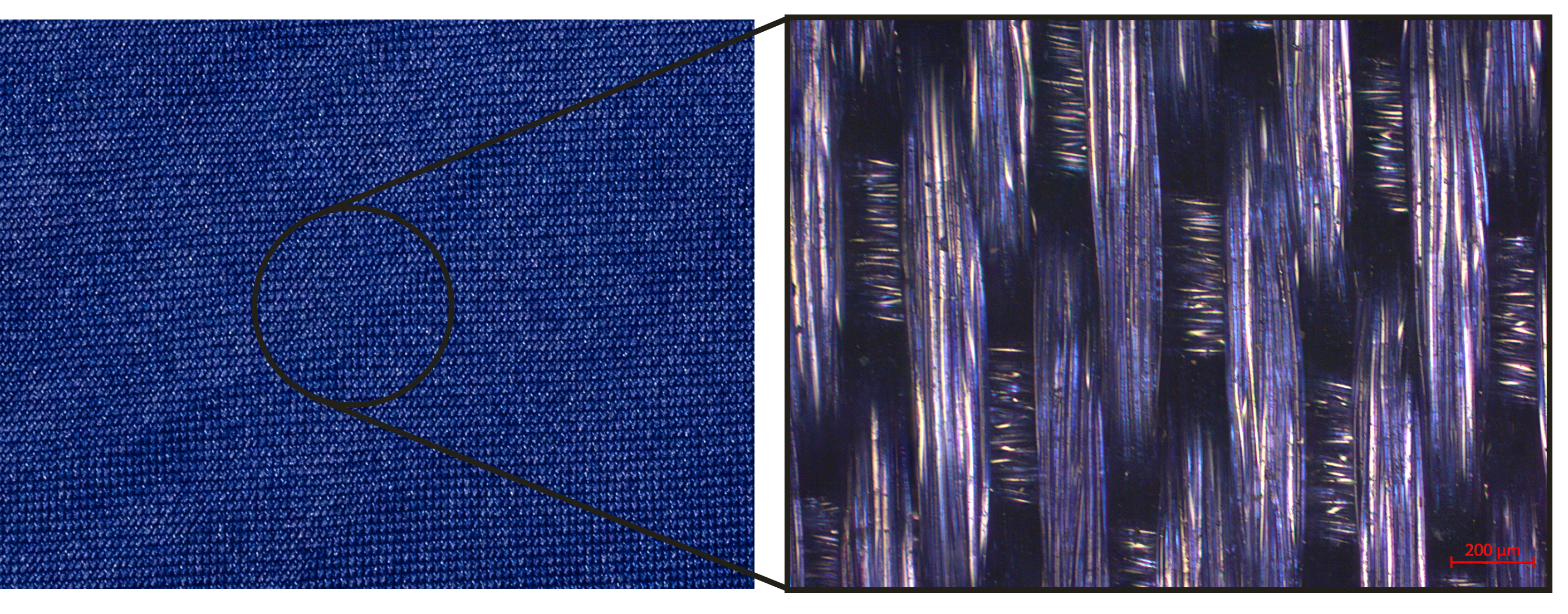 |
| 9 | Poly Cotton (65% Polyester/ 35% Cotton) | 0.39 | 0.01 | 0.19 | 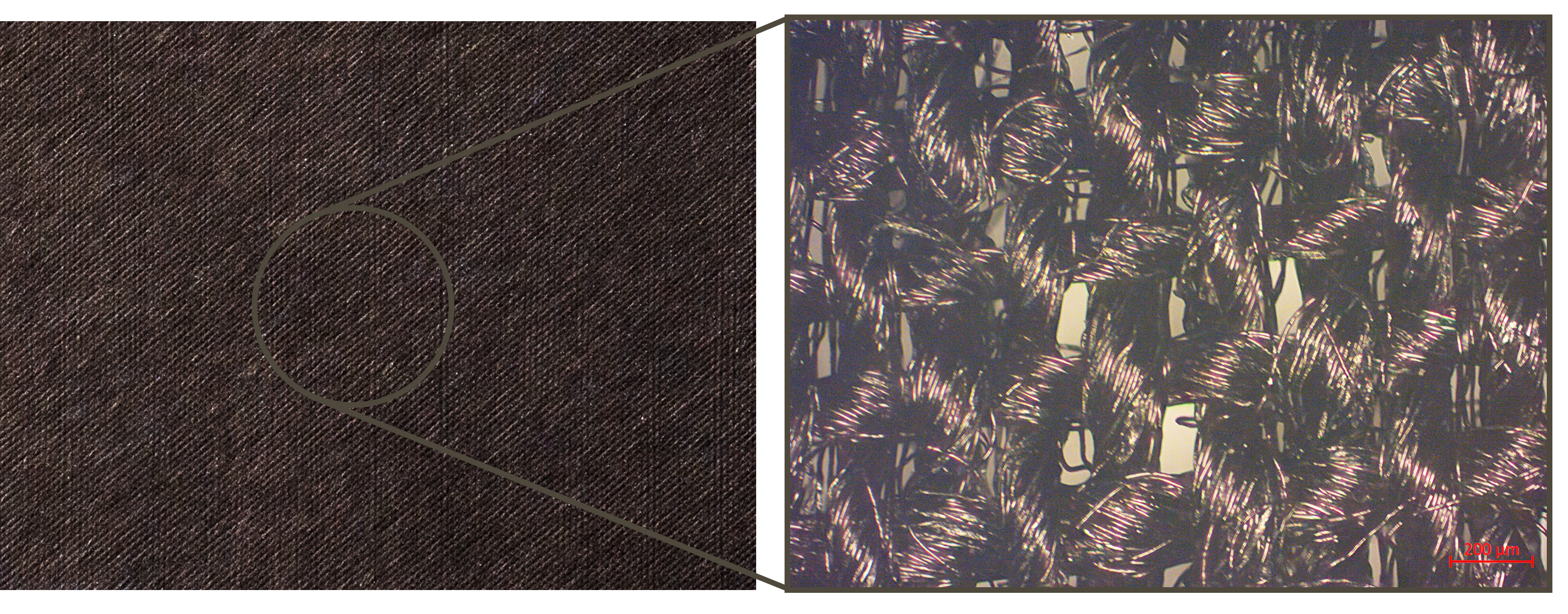 |
| 10 | Cotton (80% Polyester/ 20% Cotton) | 0.49 | 0.012 | 0.2 | 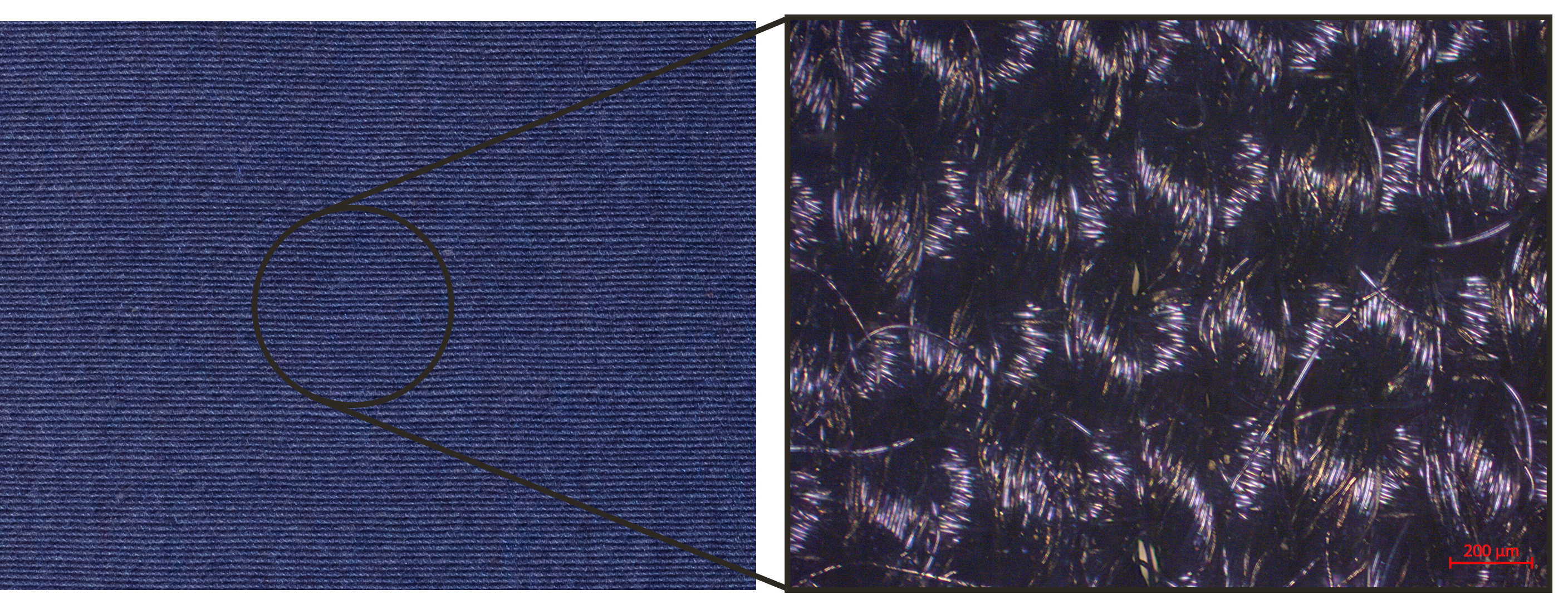 |
| 11 | 600Denier Cordura Outdoor Canvas Waterproof Fabric | 0.57 | 0.031 | 0.4 | 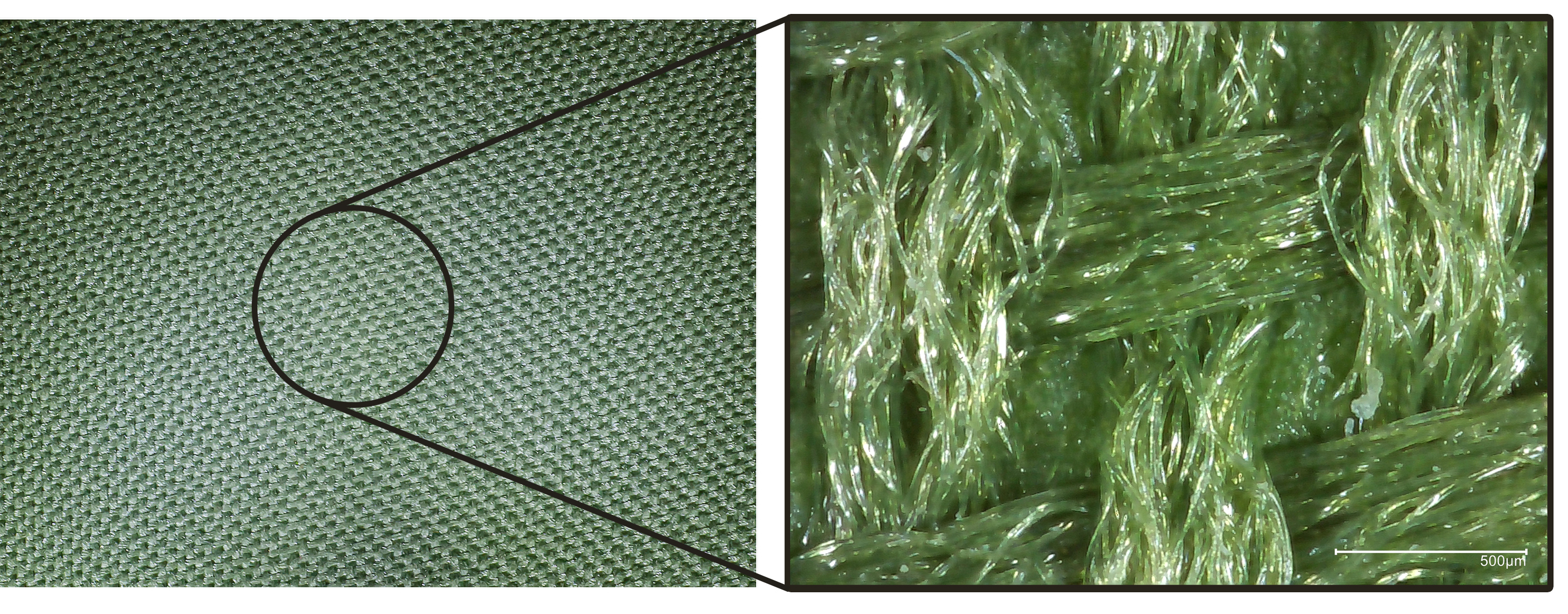 |
| 12 | Thin (5 oz per sq. yard) Denim Cotton (100%) | 0.5 | 0.014 | 0.28 | 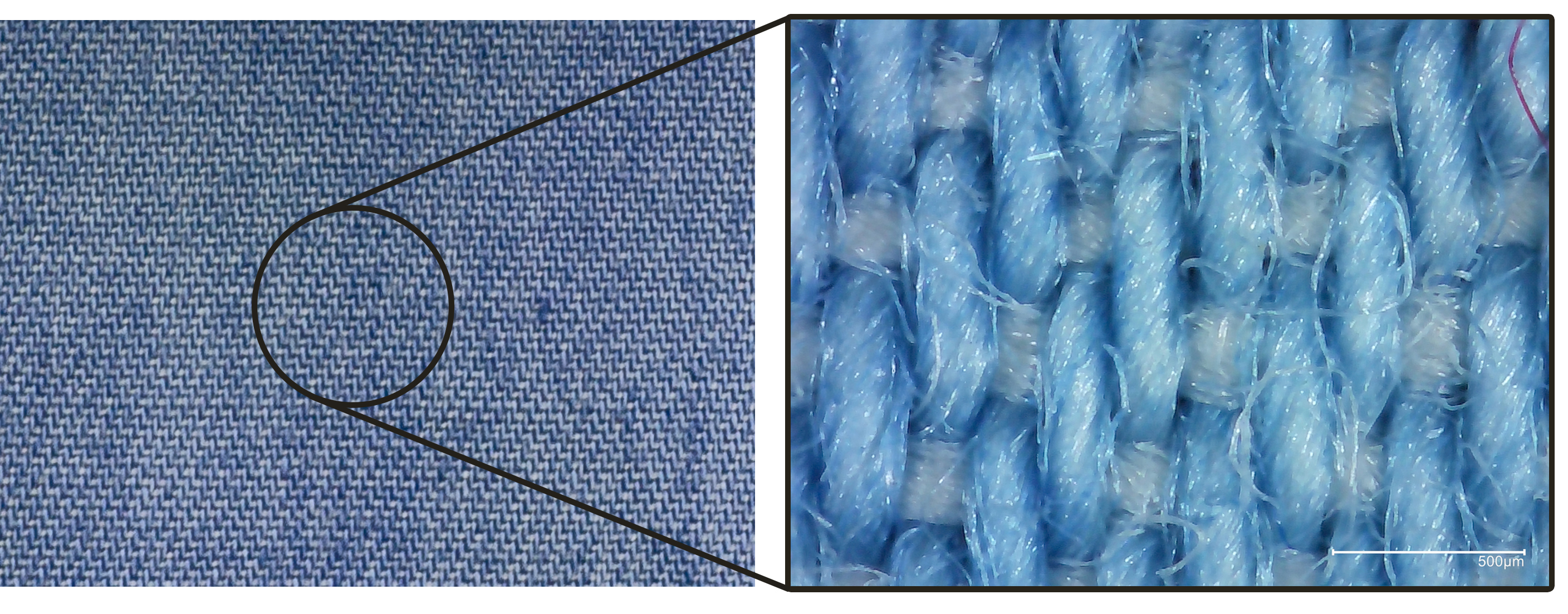 |
| 13 | Heavyweight (10 oz per sq. yard) Denim Natural Cotton (100%) | 0.44 | 0.031 | 0.62 | 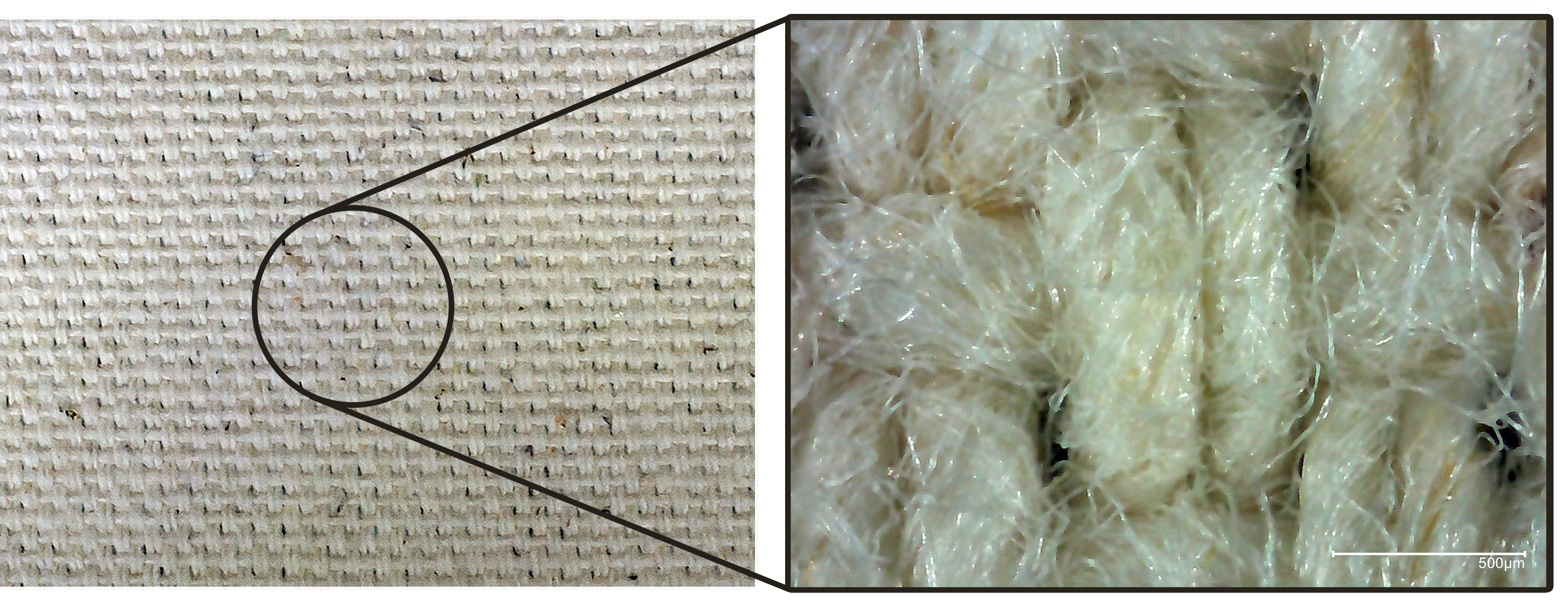 |
| 14 | Heavyweight (11 oz. per sq. yard) Denim Cotton (100%) | 0.35 | 0.036 | 0.74 | 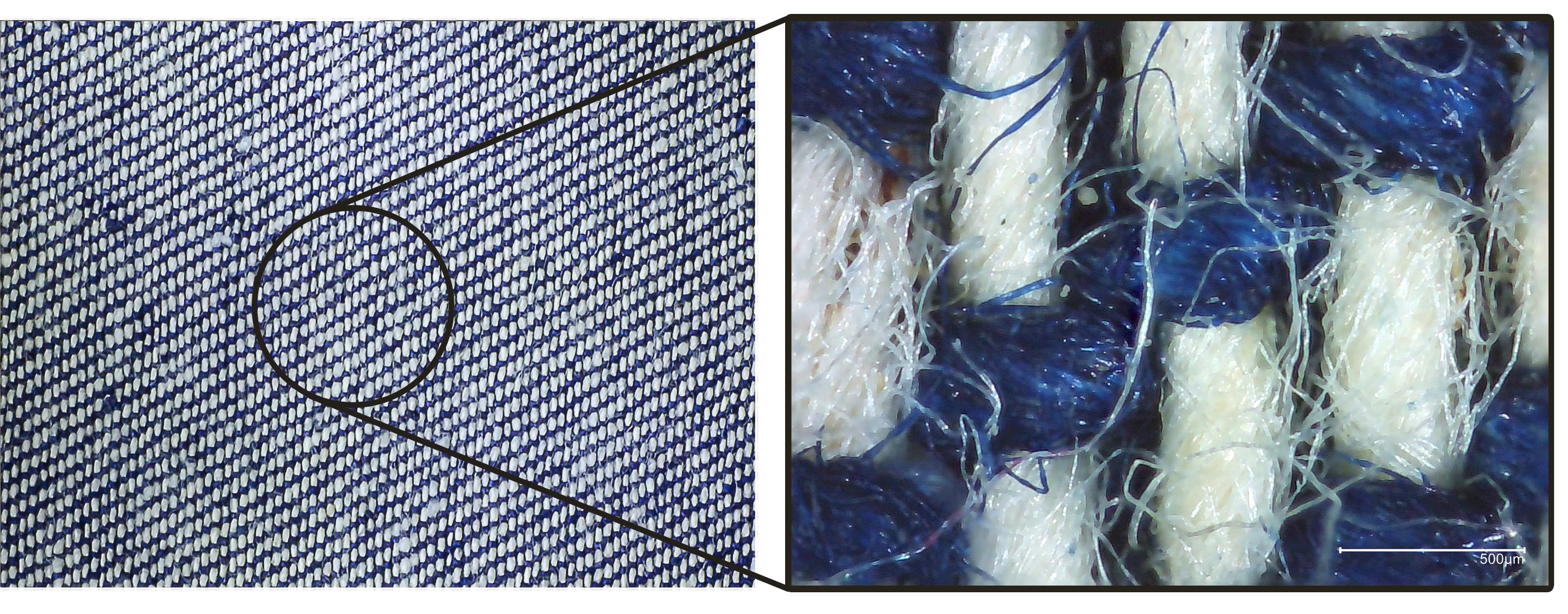 |
Surface cover from which the object is grasping
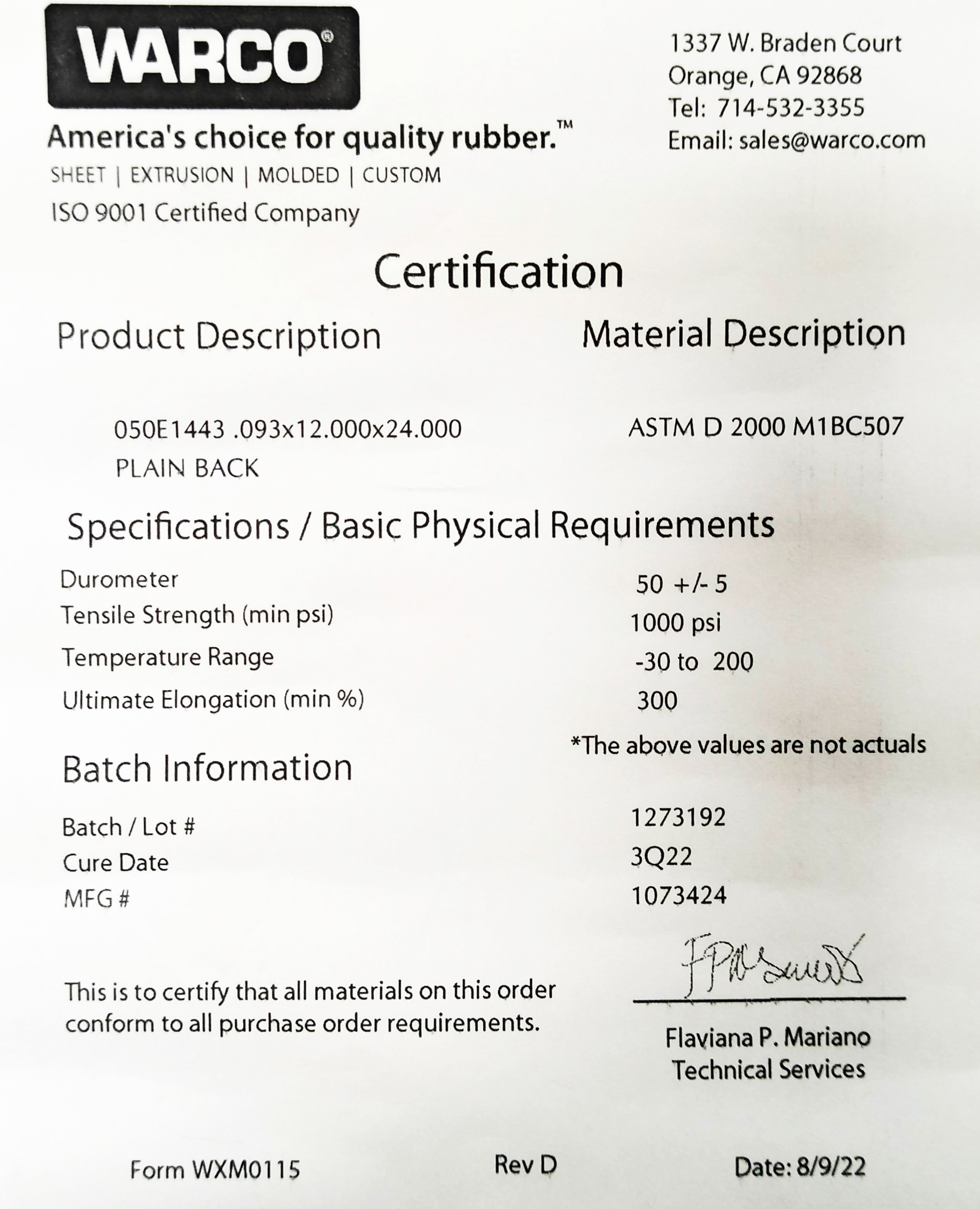
| № | Surfaces | Durometer | Coefficient of friction with Materials № 8 | Coefficient of friction with Materials № 9 | Coefficient of friction with Materials № 10 | Coefficient of friction with Materials № 11 |
|---|---|---|---|---|---|---|
| 0 | Table | 0.24 | 0.28 | 0.36 | 0.3 | |
| 1 | Multipurpose Neoprene with Crisscross Texture | 50A | 1.49 | 1.94 | 2.14 | 1.71 |
Multipurpose Neoprene
Results
- Failing grasping non-rigid (textile) materials using a vacuum suction cup.
- Grasping non-rigid (textile) materials using the proposed gripping device.
- Experiment to determine the holding force of non-rigid materials when lifting them vertically with different orientations of the gripper.
Results Presentation
- T. Alkis, A. M. Fey and R. Mykhailyshyn, (2026). "Robotic Integration of Pneumatic Grasping Systems for Deformable Textile Handling: Automated Characterization Approach." 2026 IEEE/SICE International Symposium on System Integration (SII), Cancun, Mexico, 2026, pp. 213-218, doi: 10.1109/SII64115.2026.11404705.
- R. Mykhailyshyn, J. Romancik, K. Harada, A. Majewicz Fey, (2025). "Vibration Vanquished: Enhancing Grasping of Deformable Objects with Jet Gripper Technology." 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, 2025, pp. 2874-2880, doi: 10.1109/CASE58245.2025.11164006.
- R. Mykhailyshyn "Increasing the Holding Force of Non-Rigid Materials Through Robot End-Effector Reorientation." IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation Openreview.net.
Publications
- R. Mykhailyshyn, J. Lee, M. Mykhailyshyn, K. Harada, A. Majewicz Fey, (2025). "Dexterous Manipulation of Deformable Objects via Pneumatic Gripping: Lifting by One End." arXiv preprint. arXiv: 2501.05198.
- R. Mykhailyshyn, A. Majewicz Fey, J. Xiao, (2024). "Toward Novel Grasping of Non-Rigid Materials Through Robotic End-Effector Reorientation." IEEE/ASME Transactions on Mechatronics. 29(4), 2614-2624. https://doi.org/10.1109/TMECH.2023.3337628.
- R. Mykhailyshyn, A. Majewicz Fey, J. Xiao, (2023). "Finite Element Modeling of Grasping Porous Materials in Robotics Cells." Robotica. 41(11), 3485-3500. https://doi.org/10.1017/S0263574723001121.
- R. Mykhailyshyn, V. Savkiv, A. Majewicz Fey, J. Xiao, (2023). "Gripping Device for Textile Materials." IEEE Transactions on Automation Science and Engineering. 20(4), 2397–2408. https://doi.org/10.1109/TASE.2022.3208796.
- R. Mykhailyshyn, J. Xiao, (2022). "Influence of Inlet Parameters on Power Characteristics of Bernoulli Gripping Devices for Industrial Robots." Applied Sciences. 12(14), 7074. https://doi.org/10.3390/app12147074.
- R. Mykhailyshyn, V. Savkiv, P. Maruschak, J. Xiao, (2022). "A Systematic Review on Pneumatic Gripping Devices for Industrial Robots." Transport. 37(3), 201–231. https://doi.org/10.3846/transport.2022.17110.
Awards
- Scientific Photography “Smoked air-flow of modified Bernoulli-based gripper for grasping textile materials” was selected as a finalist in the Wiki Science Competition 2025: