Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
We were delighted to host Dr. Jinoh Lee from the Deutsches Zentrum für Luft- und Raumfahrt (DLR) German Aerospace Center for his talk: “Torque-controlled Humanoid and Locomotion Control in the German Aerospace Center.” Dr. Lee shared recent progress on TORO, the torque-controlled humanoid robot, and discussed advances in safe and compliant whole-body motion in unstructured environments. 
Published:
It was a great pleasure to host Dr. Daniel Seita (Assistant Professor at the University of Southern California) who gave an invited seminar talk “Representations for Dexterous Robot Manipulation” for our Robotic Manipulation Lab (Osaka University), led by Prof. Kensuke Harada. A great discussion was held with key questions raised by Prof. Weiwei Wan and the students. Such exchanges of ideas in one area of robotics knowledge inspire further work and collaboration. 
Published:
Dr. Roman Mykhailyshyn presented the direction of his scientific work at the PI meeting organized by the National Science Foundation in Washington DC. 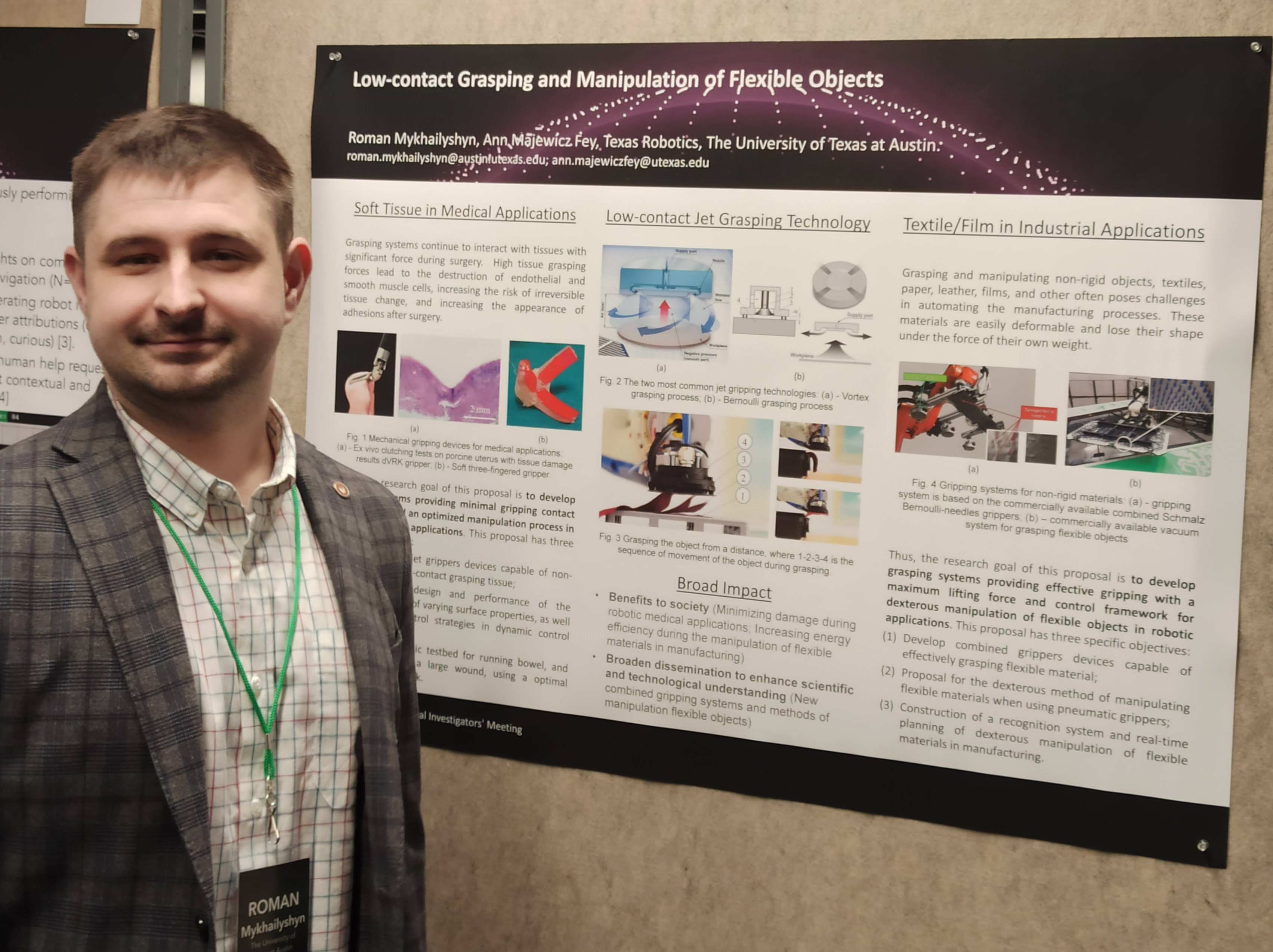
Published:
Dr. Roman Mykhailyshyn one of the Scholars in UT “UT CREEES Welcomes Scholars from Ukraine to the Forty Acres”. 
Published:
Dr. Roman Mykhailyshyn published an article “Ukrainian Volunteers Use 3D Printers to Save Lives” in IEEE Spectrum, edited by Evan Ackerman. 
Published:
The Worcester Telegram & Gazette spoke with Fulbright scholars Yuliia Kleban and Roman Mykhailyshyn, about the war in Ukraine and their efforts to help people affected by the conflict. Both Kleban and Mykhailyshyn are from Ukraine and completed their Fulbright scholarships at WPI, just weeks before the war began. 
Published:
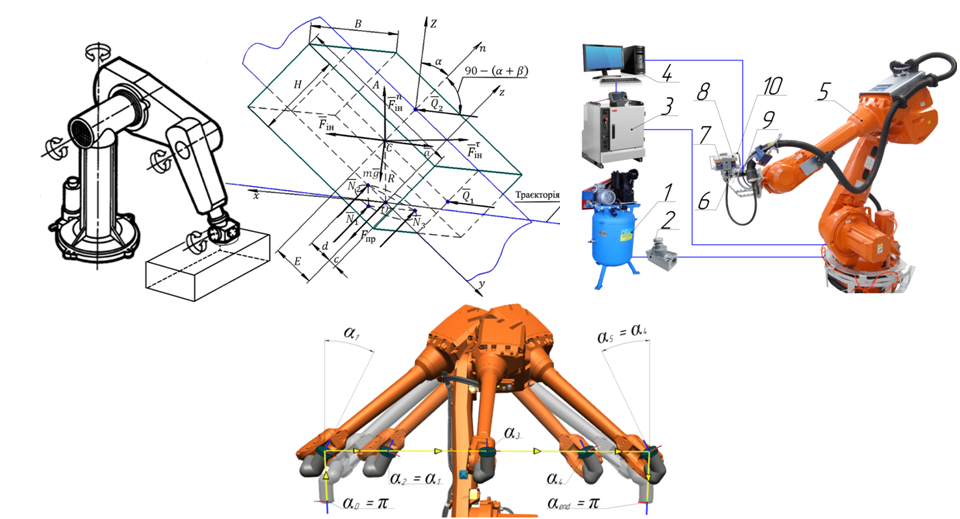
The project under the direction of Mykhailyshyn Roman became a finalist of the IX Festival of Innovative Projects “Sikorsky Challenge 2020”. In particular, the project “Energy Efficient Non-Contact Bernoulli Gripping Devices for Industrial Robots” was presented. 
Published:
Organized and conducted an excursion at Flextronics International Ltd. 2018 (Mukachevo, Zakarpattia region, Ukraine) for students of KA, KT groups. 

Published:
Mykhailyshyn Roman participated in the competition of the State Fund for Basic Research of Young Scientists “Science-Society-Personality” (2017, Kyiv, project: “Development of models for optimizing the orientation of the brush of industrial work”) and became a finalist. 
Published in Journal of Electrical Engineering, 2017
Recommended citation: V. Savkiv, R. Mykhailyshyn, F. Duchon, M. Mikhalishin, (2017). "Energy Efficiency Analysis of the Manipulation Process by the Industrial Objects With the Use of Bernoulli Gripping Devices." Journal of Electrical Engineering. 68(6). 496 – 502.
Published in International Journal of Advanced Robotic Systems, 2017
Recommended citation: V. Savkiv, R. Mykhailyshyn, F. Duchon, O. Fendo, (2017). "Justification of Design and Parameters of Bernoulli-Vacuum Gripping Device." International Journal of Advanced Robotic Systems. doi:10.1177/1729881417741740.
Published in Procedia Engineering, 2017
Recommended citation: V. Savkiv., R. Mykhailyshyn., O. Fendo, M. Mykhailyshyn, (2017). "Orientation Modeling of Bernoulli Gripper Device with Off-Centered Masses of the Manipulating Object." Procedia Engineering. 187, 264 – 271.
Published in International Journal of Advanced Robotic Systems, 2018
Recommended citation: V. Savkiv, R. Mykhailyshyn, F. Duchon, M. Mikhalishin, (2018). "Modeling of Bernoulli Gripping Device Orientation when Manipulating Objects Along the Arc." International Journal of Advanced Robotic Systems. doi: 1729881418762670.
Published in Journal of Electrical Engineering, 2019
Recommended citation: A. Trizuljak, F. Duchoň, J. Rodina, A. Babinec, M. Dekan, R. Mykhailyshyn, (2019). "Control of a Small Quadrotor for Swarm Operation." Journal of Electrical Engineering. 70(1). 3 - 15.
Published in Vacuum, 2019
Recommended citation: V. Savkiv, R. Mykhailyshyn, F. Duchon, (2019). "Gasdynamic Analysis of the Bernoulli Grippers Interaction with the Surface of Flat Objects with Displacement of the Center of Mass." Vacuum. 159. 524 – 533.
Published in Energetika, 2019
Recommended citation: I. Diahovchenko, R. Mykhailyshyn, D. Danylchenko, S. Shevchenko, (2019). "Rogowsky Coil Applications for Power Measurement Under Non-Sinusoidal Field Conditions." Energetika. 65(1). 14 – 20.
Published in Lecture Notes in Intelligent Transportation and Infrastructure, 2020
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, F. Duchon, O. Prentkovskis, I. Diahovchenko (2020). "Analysis of Operational Characteristics of Pneumatic Device of Industrial Robot for Gripping and Control of Parameters of Objects of Manipulation." Lecture Notes in Intelligent Transportation and Infrastructure. 504–510. doi: 10.1007/978-3-030-38666-5_53.
Published in Lecture Notes in Intelligent Transportation and Infrastructure, 2020
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, F. Duchon, (2020). "Justification of Influence of the Form of Nozzle and Active Surface of Bernoulli Gripping Devices on Its Operational Characteristics." Lecture Notes in Intelligent Transportation and Infrastructure. 263–272. doi: 10.1007/978-3-030-38666-5_28.
Published in Iranian Journal of Science and Technology, Transactions of Electrical Engineering, 2020
Recommended citation: I. Diahovchenko, M. Kolcun, Z. Čonka, V. Savkiv, R. Mykhailyshyn, (2020). "Progress and Challenges in Smart Grids: Distributed Generation, Smart Metering, Energy Storage and Smart Loads." Iranian Journal of Science and Technology, Transactions of Electrical Engineering. 44. 1319 – 1333.
Published in Transport, 2021
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, V. Kyrylovych, F. Duchon, & Ľ. Chovanec, (2021). "Gripping Devices of Industrial Robots for Manipulating Offset Dish Antenna Billets and Controlling their Shape." Transport. 36(1), 63-74. doi: 10.3846/transport.2021.14622.
Published in International Journal of Manufacturing, Materials, and Mechanical Engineering , 2021
Recommended citation: R. Mykhailyshyn, V. Savkiv, I. Boyko, E. Prada, & I. Virgala, (2021). "Substantiation of Parameters of Friction Elements of Bernoulli Grippers With a Cylindrical Nozzle." International Journal of Manufacturing, Materials, and Mechanical Engineering . 11(2). 17 - 39. doi: 10.4018/IJMMME.2021040102
Published in Ukrainian Journal of Physical Optics, 2022
Recommended citation: Boyko I., Petryk M. and Mykhailyshyn R., (2022). "Excitons in resonant tunnelling structures based on AlN/GaN/AlN/AlGaN/AlN nitride spectral dependences and intensities of interband optical transitions." Ukrainian Journal of Physical Optics. 23(3), 180-191. https://doi.org/10.3116/16091833/23/3/180/2022. http://www.ifo.lviv.ua/journal/2022/2022_3_23_08.html
Published in Applied Sciences, 2022
Recommended citation: R. Mykhailyshyn, J. Xiao, (2022). "Influence of Inlet Parameters on Power Characteristics of Bernoulli Gripping Devices for Industrial Robots." Applied Sciences. 12(14), 7074. https://doi.org/10.3390/app12147074. https://www.mdpi.com/2076-3417/12/14/7074
Published in Transport, 2022
Recommended citation: R. Mykhailyshyn, V. Savkiv, P. Maruschak, J. Xiao, (2022). "A Systematic Review on Pneumatic Gripping Devices for Industrial Robots." Transport. 37(3), 201–231. https://doi.org/10.3846/transport.2022.17110. https://journals.vilniustech.lt/index.php/Transport/article/view/17110
Published in Machines, 2022
Recommended citation: Miková Ľ, Prada E, Kelemen M, Krys V, Mykhailyshyn R, Sinčák PJ, Merva T, Leštach L. (2022). "Upgrade of Biaxial Mechatronic Testing Machine for Cruciform Specimens and Verification by FEM Analysis." Machines. 10(10), 916. https://doi.org/10.3390/machines10100916. https://www.mdpi.com/2075-1702/10/10/916
Published in MM Science Journal, 2022
Recommended citation: Hroncova D, Sincak P, Merva T, Mykhailyshyn R (2022). "Robot Trajectory Planning." MM Science Journal. https://doi.org/10.17973/MMSJ.2022_11_2022093. https://www.mmscience.eu/journal/issues/november-2022/articles/robot-trajectory-planning
Published in Robotics, 2022
Recommended citation: Mykhailyshyn, R.; Duchoň, F.; Mykhailyshyn, M.; Majewicz Fey, A. (2022). "Three-Dimensional Printing of Cylindrical Nozzle Elements of Bernoulli Gripping Devices for Industrial Robots." Robotics. 11(6), 140. https://doi.org/10.3390/robotics11060140. https://www.mdpi.com/2218-6581/11/6/140
Published in Journal of Advanced Manufacturing Systems, 2023
Recommended citation: Ihor Stadnyk, Volodymyr Piddubnyi, Roman Mykhailyshyn, Ievgenii Petrychenko, Viktor Fedoriv, Volodymyr Kaspruk, (2023). "The influence of rheology and design of modelling rolls on the flow and specific gravity during dough rolling and injection." Journal of Advanced Manufacturing Systems. -(-), -. https://doi.org/10.3390/app12147074. https://www.worldscientific.com/doi/epdf/10.1142/S0219686723500208
Published in Applied Sciences, 2023
Recommended citation: Beliakova Iryna, Vadim Piscio, Pavlo Maruschak, Oleksandr Shovkun, Volodymyr Medvid, and Roman Mykhailyshyn, (2023). " Research Control Devices for LED Light Sources under Their Operating Conditions at Elevated Temperatures." Applied Sciences. 13(12):7247. hhttps://doi.org/10.3390/app13127247. https://doi.org/10.3390/app13127247
Published in Robotics, 2023
Recommended citation: Martin Psotka, František Duchoň, Roman Mykhailyshyn, Tölgyessy Michal, Dobiš Michal, (2023). "Global Path Planning Method Based on a Modification of the Wavefront Algorithm for Ground Mobile Robots." Robotics. 12(1). https://doi.org/10.3390/robotics12010025. https://www.mdpi.com/2218-6581/12/1/25
Published in Machines, 2023
Recommended citation: Mykhailyshyn Roman, František Duchoň, Ivan Virgala, Peter Jan Sinčák, and Ann Majewicz Fey (2023). " Optimization of Outer Diameter Bernoulli Gripper with Cylindrical Nozzle." Machines. 11(6):667. https://doi.org/10.3390/machines11060667. https://doi.org/10.3390/machines11060667
Published in Robotica, 2023
Recommended citation: Roman Mykhailyshyn, Ann Majewicz Fey, Jing Xiao, (2023). " Finite element modeling of grasping porous materials in robotics cells." Robotica. 41(11), 3485-3500. https://doi.org/10.1017/S0263574723001121. https://doi.org/10.1017/S0263574723001121
Published in IEEE Transactions on Automation Science and Engineering, 2023
Recommended citation: R. Mykhailyshyn, V. Savkiv, A. Majewicz Fey, J. Xiao, (2023). "Gripping Device for Textile Materials." IEEE Transactions on Automation Science and Engineering. 20(4), 2397–2408. https://doi.org/10.1109/TASE.2022.3208796. https://doi.org/10.1109/TASE.2022.3208796
Published in Sensors, 2024
Recommended citation: Peter Sincak, Erik Prada, Ľubica Miková, Roman Mykhailyshyn, Martin Varga, Tomas Merva, and Ivan Virgala (2024). " Sensing of Continuum Robots: A Review." Sensors. 24(4):1311. https://doi.org/10.3390/s24041311. https://doi.org/10.3390/s24041311
Published in Applied Sciences, 2024
Recommended citation: Iryna Beliakova, Liubov Kostyk, Pavlo Maruschak, Volodymyr Medvid, Vadim Piscio, Oleksandr Shovkun, and Roman Mykhailyshyn (2024). " The Temperature Dependence of the Parameters of LED Light Source Control Devices Powered by Pulsed Voltage." Applied Sciences. 14(13):5678. https://doi.org/10.3390/app14135678. https://doi.org/10.3390/app14135678
Published in Applied Sciences, 2024
Recommended citation: Pavlo Maruschak, Ihor Konovalenko, Yaroslav Osadtsa, Volodymyr Medvid, Oleksandr Shovkun, Denys Baran, Halyna Kozbur, Roman Mykhailyshyn (2024). " Surface Illumination as a Factor Influencing the Efficacy of Defect Recognition on a Rolled Metal Surface Using a Deep Neural Network." Applied Sciences. 14(6):2591. https://doi.org/10.3390/app14062591. https://doi.org/10.3390/app14062591
Published in Symmetry, 2024
Recommended citation: Erik Prada, Ľubica Miková, Ivan Virgala, Michal Kelemen, Peter Sincak, and Roman Mykhailyshyn (2024). " Mathematical Modeling of Robotic Locomotion Systems." Symmetry. 16(3):376. https://doi.org/10.3390/sym16030376. https://doi.org/10.3390/sym16030376
Published in Applied Mathematical Modelling, 2024
Recommended citation: Ivan Virgala, Martin Varga, Peter Ján Sinčák, Tomáš Merva, Roman Mykhailyshyn, Michal Kelemen (2024). " Mathematical framework for snake robot motion in a confined space." Applied Mathematical Modelling. -(-):-. https://doi.org/10.1016/j.apm.2024.04.020. https://doi.org/10.1016/j.apm.2024.04.020
Published in IEEE/ASME Transactions on Mechatronics, 2024
Recommended citation: Roman Mykhailyshyn, Ann Fey, and Jing Xiao, (2024). "Toward Novel Grasping of Non-Rigid Materials Through Robotic End-Effector Reorientation." IEEE/ASME Transactions on Mechatronics. 29(4), 2614-2624. https://doi.org/10.1109/TMECH.2023.3337628. https://doi.org/10.1109/TMECH.2023.3337628
Published in Advances in Science and Technology Research Journal, 2025
Recommended citation: Puchała Krzysztof, Grzegorz Moneta, Daniel Lichoń, Rafał Grzejda, Arkadiusz Bednarz, Witold Mielniczek, Marian Łopatka, Elżbieta Szymczyk, Sergii Ignatovych, and Roman Mykhailyshyn, (2025). "Aerial medical platform for soldiers and civils evacuation – Concept, implementation plan and assessment of adaptation possibility of existing technologies." Advances in Science and Technology Research Journal. 19(2), 28-50. https://doi.org/10.12913/22998624/195344. https://doi.org/10.12913/22998624/195344
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, M. Mikhalishin, F. Duchon, (2017). “Experimental Investigations of the Dynamics of Contactless Transportation by Bernoulli Grippers.” In Young Scientists Forum on Applied Physics and Engineering, International IEEE Conference. 8 – 11. doi: 10.1109/YSF.2017.8126583. 
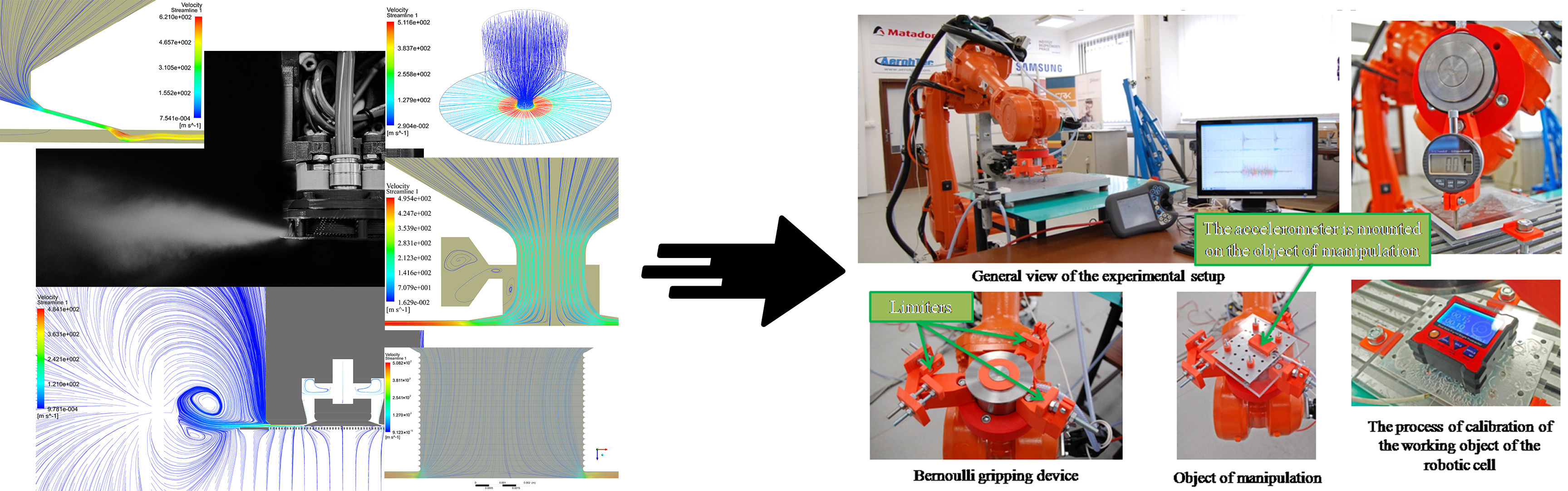
Abstract: The reducing of energy consumption for transportation and manipulation of industrial objects is a topical issue. The objects of manipulation are gripped with the use of industrial robot and transported from one position to another. In gripping devices, the lifting force is created on the basis of the aerodynamic effect of lifting appearing due to the use of compressed air. The efficiency of functioning of such devices significantly depends on the compressed air expenses to preserve the balance of the object of manipulation as to the gripping device while transporting it. That is why the issue of defining optimal orientation of gripping device has arisen, It should ensure uninterrupted transportation of the object of manipulation at minimal expenses of the compressed air under different transport conditions (predetermined trajectory, movement velocity and acceleration).
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, F. Duchon, V. Koloskov, I. Diahovchenko, (2018). “Analysis of frontal resistance force influence during manipulation of dimensional objects.” IEEE 3rd International Conference on Intelligent Energy and Power Systems (IEPS). 301 – 305. doi: 10.1109/IEPS.2018.8559527.
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, F. Duchon, V. Koloskov, I. Diahovchenko, (2018). “Investigation of the energy consumption on performance of handling operations taking into account parameters of the grasping system.” IEEE 3rd International Conference on Intelligent Energy and Power Systems (IEPS). 295 – 300. doi: 10.1109/IEPS.2018.8559586.
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, F. Duchon, P. Maruschak, O. Prentkovskis, (2018). “Substantiation of Bernoulli Grippers Parameters at Non-Contact Transportation of Objects with a Displaced Center of Mass.” 22nd International Scientific Conference Transport Means. 1370 – 1375. Download the paper.
Published:
Open lecture “Handling Systems for Industrial Robots” at the Institute of Automation, Robotics and Mechatronics, Technical University of Kosice, Slovak Republic. 
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, I. Diahovchenko, R. Olsen, D. Danylchenko, (2019). “Protection of Digital Power Meters Under the Influence of Strong Magnetic Fields.” IEEE 2nd Ukraine Conference on Electrical and Computer Engineering UKRCON-2019. 314 – 320. doi: 10.1109/UKRCON.2019.8879985.
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, I. Diahovchenko, F. Duchon, R. Trembach (2019). “Research of Energy Efficiency of Manipulation of Dimensional Objects With the Use of Pneumatic Gripping Devices.” IEEE 2nd Ukraine Conference on Electrical and Computer Engineering UKRCON-2019. 527 – 532. doi: 10.1109/UKRCON.2019.8879957. 
Abstract: The process of manipulation of dimensional objects without optimization and with orientation of optimization gripping systems is investigated. The comparative analysis of energy efficiency of transportation of dimensional objects with orientation optimization gripping systems on the basis of vacuum, vortex and Bernoulli gripping devices is carried out. The efficiency of use of a method of optimization of orientation gripping systems on the basis of pneumatic gripping devices is proved.
Published:
Recommended citation: I. Diahovchenko, I. Lebedynskyi, R. Mykhailyshyn, V. Savkiv, (2019). “Methods to Improve the Accuracy of Power Meters through the Application of Nanomaterials and Calibration Techniques.” IEEE 9th International Conference Nanomaterials: Applications & Properties (NAP). doi: 10.1109/NAP47236.2019.216994.
Published:
Recommended citation: R. Mykhailyshyn, I. Belyakova, V. Medvid, V. Piscio, O. Shkodzinsky, M. Markovych, (2019). “Usage of Light-Emitting-Diode Lamps in Decorative Lighting.” IEEE 20th International Conference on Computational Problems of Electrical Engineering (CPEE). doi: 10.1109/CPEE47179.2019.8949154. 
Abstract: The article considers the usage light-emitting-diode lamps in decorative lighting. The possibility of adjusting the brightness of the illumination of LED lamps, which do not have an integrated controller of regulating process of luminous flux, is considered. The electric circuit of the lighting system is proposed. The limits of voltage and current regulation are calculated. The estimation of the quality of electric energy input is given.
Published:
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, L. Chovanec, E. Prada, I. Virgala, O. Prentkovskis, (2019). “Optimization of design parameters of Bernoulli gripper with an annular nozzle.” Transport Means - Proceedings of the International Conference. 423 - 428. doi: Download the paper.
Published:
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, F. Duchon, L. Chovanec, (2019). “The Analysis of Influence of a Nozzle Form of the Bernoulli Gripping Devices on its Energy Efficiency.” Proceedings of ICCPT 2019. 66 – 74. doi: 10.5281/zenodo.3387275.
Published:
Recommended citation: R. Mykhailyshyn, V. Savkiv, F. Duchon, L. Chovanec, (2020). “Experimental Investigations of the Dynamics of Contactless Transportation by Bernoulli Grippers.” IEEE 6th International Conference on Methods and Systems of Navigation and Motion Control (MSNMC). 97-100. doi: 10.1109/MSNMC50359.2020.9255521.
Published:
Recommended citation: V. Savkiv, R. Mykhailyshyn, P. Maruschak, I. Diahovchenko, F. Duchon, Ľ. Chovanec, V. Hutsaylyuk, (2020). “Gripping devices of industrial robots for manipulating offset dish antenna billets.” 13th International Conference on Intelligent Technologies in Logistics and Mechatronics Systems, ITELMS 2020. 71 – 79. Download the paper.
Published:
Recommended citation: V. Savkiv, R. Mykhailyshyn, F. Duchon, V. Medvid, V. Piscio, I. Diahovchenko, (2021). “Investigation of the Accuracy of the Base of the Object of Manipulation of Bernoulli Gripping Devices.” IEEE 3rd Ukrainian Conference on Electrical and Computer Engineering (UKRCON). 421 - 425. doi: 10.1109/UKRCON53503.2021.9575521. 
Abstract: Providing the necessary accuracy of basing Bernoulli gripping manipulation objects in robotic cells is an relevant task and can be achieved by choosing rational parameters of the handling process. The article presents the results of experimental studies of Bernoulli gripping devices of industrial robots at various operating parameters and weight of objects of manipulation. The maximum basing error of the manipulation object in relation to the gripping devices in the operation of the technical cells has been determined. When gripping objects from a distance of 0.5…1 mm average basing error value will be 0.08…0.15 mm, with a mean quadratic deviation of 0.025…0.035 mm. At displacements of center of mass of captured objects relative to Bernoulli gripping device axis up to 20 mm maximum error of objects basing increases by 2.2 times.
Published:
Recommended citation: I. Belyakova, V. Medvid, V. Piscio, V. Savkiv, R. Mykhailyshyn, M. Markovych, (2021). “Optimization of LED Drivers Depending on the Temperature of Their Operation in Lighting Devices.” IEEE 3rd Ukrainian Conference on Electrical and Computer Engineering (UKRCON). 266 - 271. doi: 10.1109/UKRCON53503.2021.9575876.
Published:
Recommended citation: I. Belyakova, V. Medvid, V. Piscio, V. Savkiv, R. Mykhailyshyn, M. Markovych, (2021). “Systems Ignition Device for High-Pressure Gas Discharge Lamps Based on Voltage Piezoelectric Transformer.” IEEE 3rd Ukrainian Conference on Electrical and Computer Engineering (UKRCON). 459 - 464. doi: 10.1109/UKRCON53503.2021.9575765.
Published:
Published:
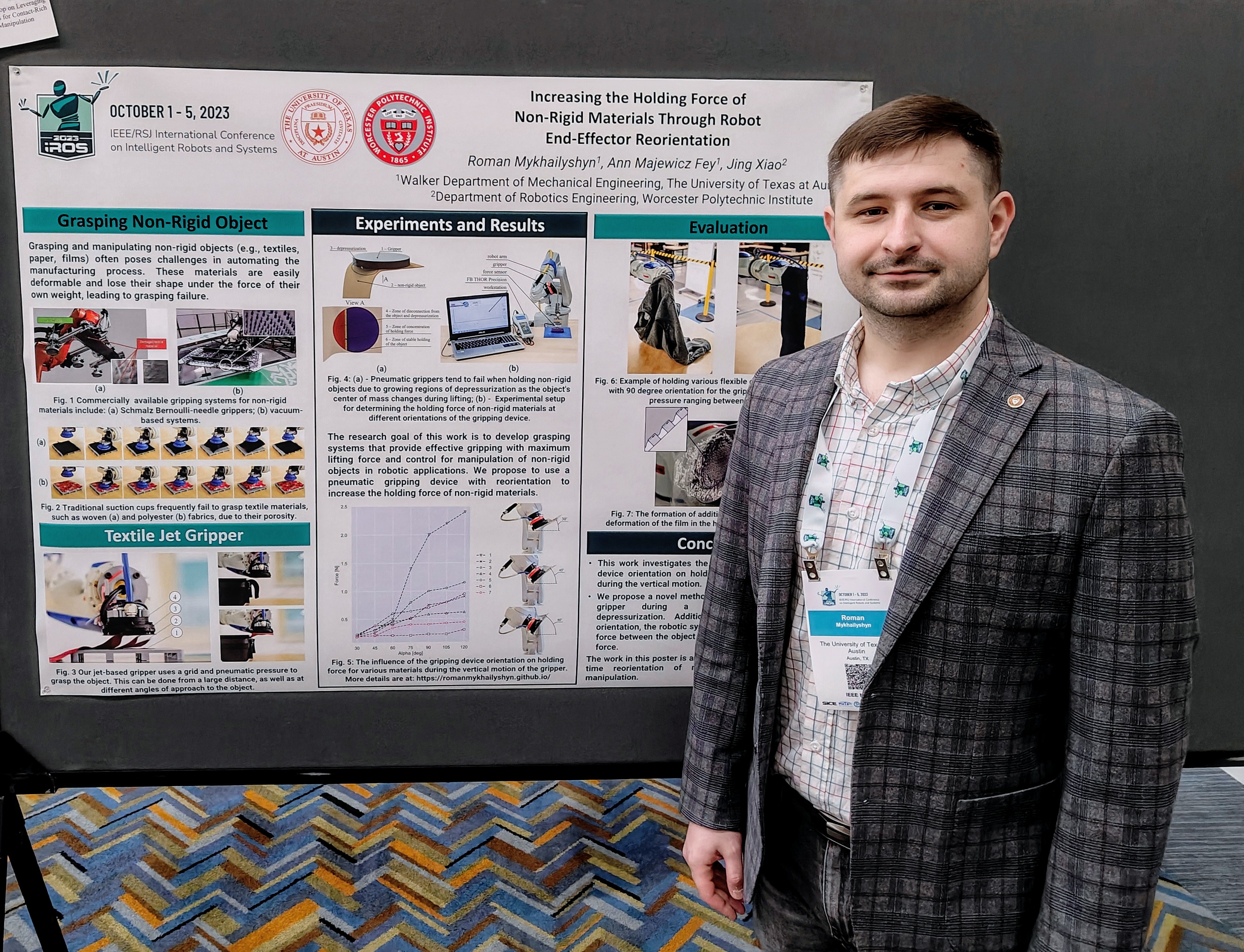
Recommended citation: Mykhailyshyn, R., Majewicz, A., & Xiao, J. (2023, September). Increasing the Holding Force of Non-Rigid Materials Through Robot End-Effector Reorientation. In IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation.
Published:
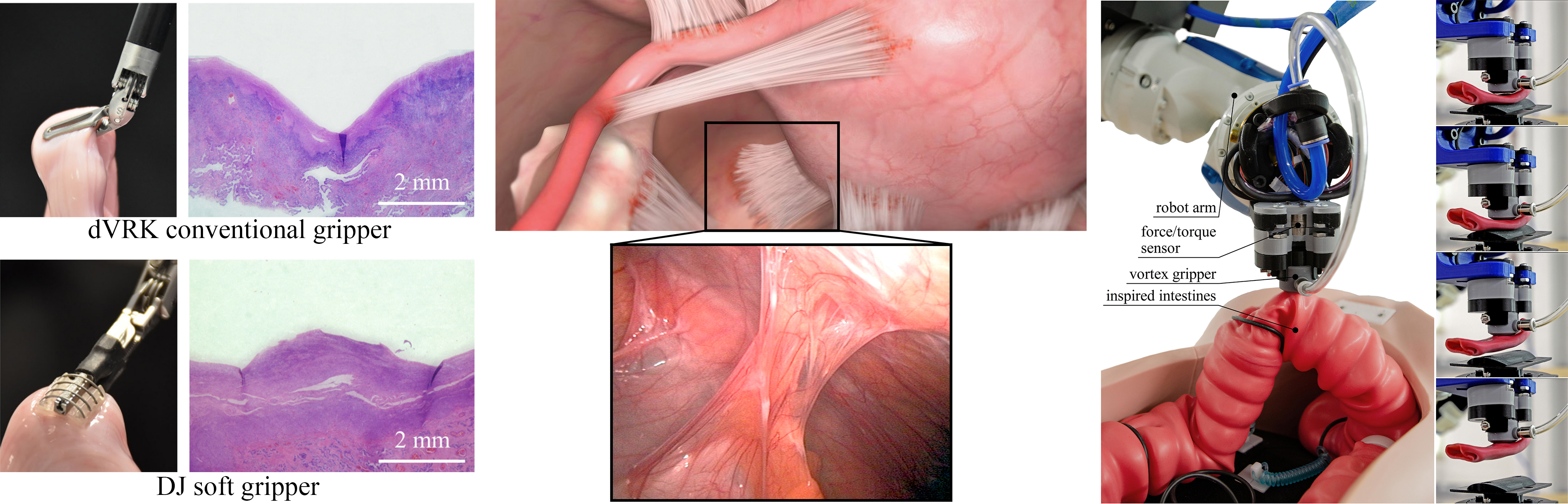
Recommended citation: Mykhailyshyn, R., Majewicz Fey, A. (2024, June). Low-Contact Grasping of Soft Tissue Using a Novel Vortex Gripper. 2024 International Symposium on Medical Robotics (ISMR), Atlanta, GA, USA, 2024, pp. 1-6, doi: 10.1109/ISMR63436.2024.10585970.
Published:
Recommended citation:Мykhailyshyn, M., Mykhailyshyn, R., Semenyshyn, H. (2024). Mathematical and numerical modeling of nonlinear deformation processes. Proceedings of the 4th International Workshop on Information Technologies: Theoretical and Applied Problems 2024, Ukraine, 2024, Vol. 3896, pp. 602-609.
Published:
Recommended citation: R. Mykhailyshyn, J. Romancik, K. Harada, A. Majewicz Fey, (2025). Vibration Vanquished: Enhancing Grasping of Deformable Objects with Jet Gripper Technology. IEEE Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, 2025, pp. 2874-2880.
Published:
Recommended citation: J.G.B. Carreon, F. Erich, R. Mykhailyshyn, T. Motoda, R. Hanai, Y. Domae (2026). A Flexible Field-Based Policy Learning Framework for Diverse Robotic Systems and Sensors. 2026 IEEE/SICE International Symposium on System Integration (SII 2026), Cancun, Mexico, 2026.
Published:
Recommended citation: T. Alkis, A. Majewicz Fey, R. Mykhailyshyn (2026). Robotic Integration of Pneumatic Grasping Systems for Deformable Textile Handling: Automated Characterization Approach. 2026 IEEE/SICE International Symposium on System Integration (SII 2026), Cancun, Mexico, 2026, pp. 213-218, doi: 10.1109/SII64115.2026.11404705.
Bachelor's course, Ternopil Ivan Puluj National Technical University, Department of Automation of Technological Processes and Manufacturing, 2016
Bachelor's course, Ternopil Ivan Puluj National Technical University, Department of Automation of Technological Processes and Manufacturing, 2018
Bachelor's course, Ternopil Ivan Puluj National Technical University, Department of Automation of Technological Processes and Manufacturing, 2018
Bachelor's course, Ternopil Ivan Puluj National Technical University, Department of Automation of Technological Processes and Manufacturing, 2021
Bachelor's course, American University Kyiv, EPAM School of Digital Technologies, 2023
Guest Lecture, The University of Texas at Austin, Walker Department of Mechanical Engineering, 2023
Bachelor's course, American University Kyiv, EPAM School of Digital Technologies, 2023
Bachelor's course, American University Kyiv, EPAM School of Digital Technologies, 2024
 ](https://www.aist.go.jp/index_en.html) [
](https://www.aist.go.jp/index_en.html) [ ](https://www.utexas.edu/) [
](https://www.utexas.edu/) [ ](https://tntu.edu.ua/?p=uk/main) [
](https://tntu.edu.ua/?p=uk/main) [ ](https://www.wpi.edu/) [
](https://www.wpi.edu/) [ ](https://auk.edu.ua//en/)
](https://auk.edu.ua//en/)